
In physics, the Lorentz transformation (or transformations) is named after the Dutch physicist Hendrik Lorentz. It was the result of attempts by Lorentz and others to explain how the speed of light was observed to be independent of the reference frame, and to understand the symmetries of the laws of electromagnetism. The Lorentz transformation is in accordance with special relativity, but was derived before special relativity.
The transformations describe how measurements of space and time by two observers are related. They reflect the fact that observers moving at different velocities may measure different distances, elapsed times, and even different orderings of events. They supersede the Galilean transformation of Newtonian physics, which assumes an absolute space and time (see Galilean relativity). The Galilean transformation is a good approximation only at relative speeds much smaller than the speed of light.
The Lorentz transformation is a linear transformation. It may include a rotation of space; a rotation-free Lorentz transformation is called a Lorentz boost.
In Minkowski space, the Lorentz transformations preserve the spacetime interval between any two events. They describe only the transformations in which the spacetime event at the origin is left fixed, so they can be considered as a hyperbolic rotation of Minkowski space. The more general set of transformations that also includes translations is known as the Poincaré group.
History
Many physicists, including Woldemar Voigt, George FitzGerald, Joseph Larmor, and Hendrik Lorentz himself had been discussing the physics implied by these equations since 1887.[1]
Early in 1889, Oliver Heaviside had shown from Maxwell’s equations that the electric field surrounding a spherical distribution of charge should cease to have spherical symmetry once the charge is in motion relative to the ether. FitzGerald then conjectured that Heaviside’s distortion result might be applied to a theory of intermolecular forces. Some months later, FitzGerald published the conjecture that bodies in motion are being contracted, in order to explain the baffling outcome of the 1887 ether-wind experiment of Michelson and Morley. In 1892, Lorentz independently presented the same idea in a more detailed manner, which was subsequently called FitzGerald–Lorentz contraction hypothesis.[2] Their explanation was widely known before 1905.[3]
Lorentz (1892–1904) and Larmor (1897–1900), who believed the luminiferous ether hypothesis, were also seeking the transformation under which Maxwell’s equations are invariant when transformed from the ether to a moving frame. They extended the FitzGerald–Lorentz contraction hypothesis and found out that the time coordinate has to be modified as well (“local time“). Henri Poincaré gave a physical interpretation to local time (to first order in v/c) as the consequence of clock synchronization, under the assumption that the speed of light is constant in moving frames.[4] Larmor is credited to have been the first to understand the crucial time dilation property inherent in his equations.[5]
In 1905, Poincaré was the first to recognize that the transformation has the properties of a mathematical group, and named it after Lorentz.[6] Later in the same year Albert Einstein published what is now called special relativity, by deriving the Lorentz transformation under the assumptions of the principle of relativity and the constancy of the speed of light in any inertial reference frame, and by abandoning the mechanical aether.[7]
Lorentz transformation for frames in standard configuration
Consider two observers O and O′, each using their own Cartesian coordinate system to measure space and time intervals. O uses (t, x, y, z) and O′ uses (t′, x′, y′, z′). Assume further that the coordinate systems are oriented so that, in 3 dimensions, the x-axis and the x′-axis are collinear, the y-axis is parallel to the y′-axis, and the z-axis parallel to the z′-axis. The relative velocity between the two observers is v along the common x-axis; O measures O′ to move at velocity v along the coincident xx′ axes, while O′ measures O to move at velocity −v along the coincident xx′ axes. Also assume that the origins of both coordinate systems are the same, that is, coincident times and positions. If all these hold, then the coordinate systems are said to be in standard configuration.
The inverse of a Lorentz transformation relates the coordinates the other way round; from the coordinates O′ measures (t′, x′, y′, z′) to the coordinates O measures (t, x, y, z), so t, x, y, z are in terms of t′, x′, y′, z′. The mathematical form is nearly identical to the original transformation; the only difference is the negation of the uniform relative velocity (from v to −v), and exchange of primed and unprimed quantities, because O′ moves at velocity v relative to O, and equivalently, O moves at velocity −v relative to O′. This symmetry makes it effortless to find the inverse transformation (carrying out the exchange and negation saves a lot of rote algebra), although more fundamentally; it highlights that all physical laws should remain unchanged under a Lorentz transformation.[8]
Below, the Lorentz transformations are called “boosts” in the stated directions.
Boost in the x-direction
![]()
The spacetime coordinates of an event, as measured by each observer in their inertial reference frame (in standard configuration) are shown in the speech bubbles.
Top: frame F′ moves at velocity v along the x-axis of frame F.
Bottom: frame F moves at velocity −v along the x′-axis of frame F′.[9]
These are the simplest forms. The Lorentz transformation for frames in standard configuration can be shown to be (see for example[10] and [11]):
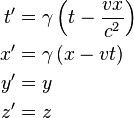
where:
- v is the relative velocity between frames in the x-direction,
- c is the speed of light,
 is the Lorentz factor (Greek lowercase gamma),
is the Lorentz factor (Greek lowercase gamma), is the velocity coefficient (Greek lowercase beta), again for the x-direction.
is the velocity coefficient (Greek lowercase beta), again for the x-direction.
The use of β and γ is standard throughout the literature.[12] For the remainder of the article – they will be also used throughout unless otherwise stated. Since the above is a linear system of equations (more technically a linear transformation), they can be written inmatrix form:

According to the principle of relativity, there is no privileged frame of reference, so the inverse transformations frame F′ to frame F must be given by simply negating v:

where the value of γ remains unchanged.
Boost in the y or z directions
The above collection of equations apply only for a boost in the x-direction. The standard configuration works equally well in the y or z directions instead of x, and so the results are similar.
For the y-direction:

summarized by

where v and so β are now in the y-direction.
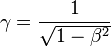
For the z-direction:
summarized by

where v and so β are now in the z-direction.
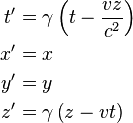
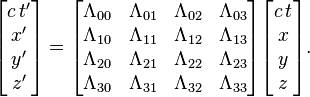
The Lorentz or boost matrix is usually denoted by Λ (Greek capital lambda). Above the transformations have been applied to the four-position X,
The Lorentz transform for a boost in one of the above directions can be compactly written as a single matrix equation:

Boost in any direction
![]()
Boost in an arbitrary direction.
Vector form[edit]
For a boost in an arbitrary direction with velocity v, that is, O observes O′ to move in direction v in the F coordinate frame, while O′ observes O to move in direction −v in the F′ coordinate frame, it is convenient to decompose the spatial vector r into components perpendicular and parallel to v:

so that

where • denotes the dot product (see also orthogonality for more information). Then, only time and the component r‖ in the direction of v;

are “warped” by the Lorentz factor:
 .
.
The parallel and perpendicular components can be eliminated, by substituting  into r′:
into r′:

Since r‖ and v are parallel we have
where geometrically and algebraically:
- v/v is a dimensionless unit vector pointing in the same direction as r‖,
- r‖ = (r • v)/v is the projection of r into the direction of v,
substituting for r‖ and factoring v gives

This method, of eliminating parallel and perpendicular components, can be applied to any Lorentz transformation written in parallel-perpendicular form.
Matrix forms[edit]
These equations can be expressed in block matrix form as

where I is the 3×3 identity matrix and β = v/c is the relative velocity vector (in units of c) as a column vector – in cartesian and tensor index notation it is:
βT = vT/c is the transpose – a row vector:

and β is the magnitude of β:

More explicitly stated:

The transformation Λ can be written in the same form as before,

which has the structure:[13]
and the components deduced from above are:
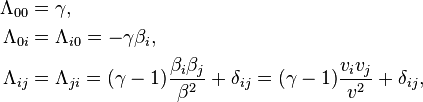
where δij is the Kronecker delta, and by convention: Latin letters for indices take the values 1, 2, 3, for spatial components of a 4-vector (Greek indices take values 0, 1, 2, 3 for time and space components).
Note that this transformation is only the “boost,” i.e., a transformation between two frames whose x, y, and z axis are parallel and whose spacetime origins coincide. The most general proper Lorentz transformation also contains a rotation of the three axes, because the composition of two boosts is not a pure boost but is a boost followed by a rotation. The rotation gives rise to Thomas precession. The boost is given by asymmetric matrix, but the general Lorentz transformation matrix need not be symmetric.
Composition of two boosts
The composition of two Lorentz boosts B(u) and B(v) of velocities u and v is given by:[14][15]
![B(\mathbf{u})B(\mathbf{v})=B\left ( \mathbf{u}\oplus\mathbf{v} \right )\mathrm{Gyr}\left [ \mathbf{u},\mathbf{v}\right ]=\mathrm{Gyr}\left [\mathbf{u},\mathbf{v} \right ]B \left ( \mathbf{v}\oplus\mathbf{u} \right )](http://upload.wikimedia.org/math/d/2/b/d2bc92820ed87642d3e19f9160655e55.png) ,
,
where
- B(v) is the 4 × 4 matrix that uses the components of v, i.e. v1, v2, v3 in the entries of the matrix, or rather the components of v/c in the representation that is used above,
 is the velocity-addition,
is the velocity-addition,- Gyr[u,v] (capital G) is the rotation arising from the composition. If the 3 × 3 matrix form of the rotation applied to spatial coordinates is given by gyr[u,v], then the 4 × 4 matrix rotation applied to 4-coordinates is given by:[14]
![\mathrm{Gyr}[\mathbf{u},\mathbf{v}]= \begin{pmatrix} 1 & 0 \\ 0 & \mathrm{gyr}[\mathbf{u},\mathbf{v}] \end{pmatrix}\,,](http://upload.wikimedia.org/math/a/b/7/ab7771e0f086cf79d006e720540dff64.png)
- gyr (lower case g) is the gyrovector space abstraction of the gyroscopic Thomas precession, defined as an operator on a velocity w in terms of velocity addition:
-
- for all w.
![\text{gyr}[\mathbf{u},\mathbf{v}]\mathbf{w}=\ominus(\mathbf{u} \oplus \mathbf{v}) \oplus (\mathbf{u} \oplus (\mathbf{v} \oplus \mathbf{w}))](http://upload.wikimedia.org/math/7/5/5/7558d528e4c138a4b33c2220ddde9651.png)
The composition of two Lorentz transformations L(u, U) and L(v, V) which include rotations U and V is given by:[16]
![L(\mathbf{u},U)L(\mathbf{v},V)=L(\mathbf{u}\oplus U\mathbf{v}, \mathrm{gyr}[\mathbf{u},U\mathbf{v}]UV)](http://upload.wikimedia.org/math/9/e/1/9e1df3b4dbc3302216b6d7fc95079fa6.png)
Visualizing the transformations in Minkowski space
Lorentz transformations can be depicted on the Minkowski light cone spacetime diagram.
![]()
The yellow axes are the rest frame of an observer, the blue axes correspond to the frame of a moving observer
The red lines are world lines, a continuous sequence of events: straight for an object travelling at constant velocity, curved for an object accelerating. Worldlines of light form the boundary of the light cone.
The purple hyperbolae indicate this is a hyperbolic rotation, the hyperbolic angle ϕ is called rapidity (see below). The greater the relative speed between the reference frames, the more “warped” the axes become. The relative velocity cannot exceed c.
The black arrow is a displacement four-vector between two events (not necessarily on the same world line), showing that in a Lorentz boost; time dilation (fewer time intervals in moving frame) and length contraction (shorter lengths in moving frame) occur. The axes in the moving frame are orthogonal (even though they do not look so).
Rapidity
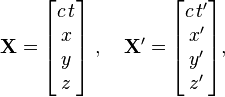
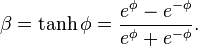
The Lorentz transformation can be cast into another useful form by defining a parameter ϕ called the rapidity (an instance of hyperbolic angle) such that

and thus

Equivalently:
![\phi = \ln \left[\gamma(1+\beta)\right] = -\ln \left[\gamma(1-\beta)\right] \,](http://upload.wikimedia.org/math/4/0/5/4059316ea27f6c51c310306cc1753299.png)
Then the Lorentz transformation in standard configuration is:
Hyperbolic expressions[edit]
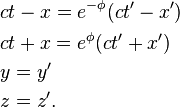
From the above expressions for eφ and e−φ


and therefore,
Hyperbolic rotation of coordinates
Substituting these expressions into the matrix form of the transformation, it is evident that
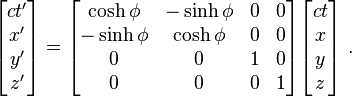
Thus, the Lorentz transformation can be seen as a hyperbolic rotation of coordinates in Minkowski space, where the parameter ϕ represents the hyperbolic angle of rotation, often referred to as rapidity. This transformation is sometimes illustrated with a Minkowski diagram, as displayed above.
This 4-by-4 boost matrix can thus be written compactly as a Matrix exponential,

where the simpler Lie-algebraic hyperbolic rotation generator Kx is called a boost generator.
Transformation of other physical quantities
The transformation matrix is universal for all four-vectors, not just 4-dimensional spacetime coordinates. If Z is any four-vector, then:[13]
or in tensor index notation:

in which the primed indices denote indices of Z in the primed frame.
More generally, the transformation of any tensor quantity T is given by:[17]

where  is the inverse matrix of
is the inverse matrix of 
Special relativity
The crucial insight of Einstein’s clock-setting method is the idea that time is relative. In essence, each observer’s frame of reference is associated with a unique set of clocks, the result being that time as measured for a location passes at different rates for different observers.[18] This was a direct result of the Lorentz transformations and is called time dilation. We can also clearly see from the Lorentz “local time” transformation that the concept of the relativity of simultaneity and of the relativity of length contraction are also consequences of that clock-setting hypothesis.[19]
Transformation of the electromagnetic field
Lorentz transformations can also be used to prove that magnetic and electric fields are simply different aspects of the same force — the electromagnetic force, as a consequence of relative motion between electric charges and observers.[20] The fact that the electromagnetic field shows relativistic effects becomes clear by carrying out a simple thought experiment:[21]
- Consider an observer measuring a charge at rest in a reference frame F. The observer will detect a static electric field. As the charge is stationary in this frame, there is no electric current, so the observer will not observe any magnetic field.
- Consider another observer in frame F′ moving at relative velocity v (relative to F and the charge). This observer will see a different electric field because the charge is moving at velocity −v in their rest frame. Further, in frame F′ the moving charge constitutes an electric current, and thus the observer in frame F′ will also see a magnetic field.
This shows that the Lorentz transformation also applies to electromagnetic field quantities when changing the frame of reference, given below in vector form.
The correspondence principle
For relative speeds much less than the speed of light, the Lorentz transformations reduce to the Galilean transformation in accordance with the correspondence principle.
The correspondence limit is usually stated mathematically as: as v → 0, c → ∞. In words: as velocity approaches 0, the speed of light (seems to) approach infinity. Hence, it is sometimes said that nonrelativistic physics is a physics of “instantaneous action at a distance”.[18]
Spacetime interval
In a given coordinate system xμ, if two events A and B are separated by

the spacetime interval between them is given by

This can be written in another form using the Minkowski metric. In this coordinate system,
Then, we can write
or, using the Einstein summation convention,

Now suppose that we make a coordinate transformation xμ → x′ μ. Then, the interval in this coordinate system is given by
or

It is a result of special relativity that the interval is an invariant. That is, s2 = s′ 2. For this to hold, it can be shown[22] that it is necessary (but not sufficient) for the coordinate transformation to be of the form

Here, Cμ is a constant vector and Λμν a constant matrix, where we require that

Such a transformation is called a Poincaré transformation or an inhomogeneous Lorentz transformation.[23] The Ca represents a spacetime translation. When Ca = 0, the transformation is called an homogeneous Lorentz transformation, or simply a Lorentz transformation.
Taking the determinant of

gives us

The cases are:
- Proper Lorentz transformations have det(Λμν) = +1, and form a subgroup called the special orthogonal group SO(1,3).
- Improper Lorentz transformations are det(Λμν) = −1, which do not form a subgroup, as the product of any two improper Lorentz transformations will be a proper Lorentz transformation.
From the above definition of Λ it can be shown that (Λ00)2 ≥ 1, so either Λ00 ≥ 1 or Λ00 ≤ −1, called orthochronous and non-orthochronous respectively. An important subgroup of the proper Lorentz transformations are the proper orthochronous Lorentz transformations which consist purely of boosts and rotations. Any Lorentz transform can be written as a proper orthochronous, together with one or both of the two discrete transformations; space inversion P and time reversal T, whose non-zero elements are:


The set of Poincaré transformations satisfies the properties of a group and is called the Poincaré group. Under the Erlangen program, Minkowski space can be viewed as the geometry defined by the Poincaré group, which combines Lorentz transformations with translations. In a similar way, the set of all Lorentz transformations forms a group, called the Lorentz group.
A quantity invariant under Lorentz transformations is known as a Lorentz scalar.